Observer-Based Hybrid Fuzzy Controller Design and Its Application to Two-Wheeled Self-Balancing Robot
##plugins.themes.bootstrap3.article.sidebar##
##plugins.themes.bootstrap3.article.main##
Abstract
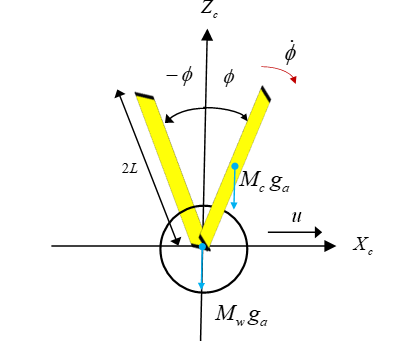
An observer-based hybrid fuzzy controller (OBHFC) for a certain class of unknown nonlinear dynamical system is developed in this study. The proposed OBHFC is designed according to the transparency of the plant knowledge and the control information. Further, to confront the lack of state information, a state observer is added to estimate the tracking error vector, and then the states can be obtained completely. Utilization of the observer-based output feedback control, the controller’s parameters can be tuned in the sense of Lyapunov stability theorem. Finally, the proposed OBHFC is extended its application to balance control a two-wheeled robot. In the balance controller, the software observer is embedded to replace the gyroscope to reduce the hardware cost. To verify its effectiveness, some simulations are carried out. The performances of simulated data are compared with conventional adaptive fuzzy sliding-mode controller (AFSMC). From these results, the proposed control scheme possesses some features of stable tracking performance, lower hardware cost and shorter response time.
##plugins.themes.bootstrap3.article.details##

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.