Advanced Defect Localization Using Principal Component Analysis (PCA) and Bilateral Filtering in Robotics Systems
##plugins.themes.bootstrap3.article.sidebar##
##plugins.themes.bootstrap3.article.main##
Abstract
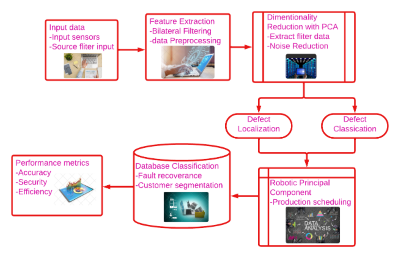
Defect localization is critical for maintaining system performance in robotics, especially when it comes to high-precision tasks. Traditional methods often struggle to handle noisy data and subtle defects; thus, more advanced solutions are required to achieve higher accuracy and dependability in defect detection. This work focuses on both error reduction and defect detection. They tried to use a hybrid defect localization algorithm that they referred to as PCA and Bilateral Filtering, by using their method can increase the accuracy, precision, and robustness of real-time robotic systems. The proposed approach integrated PCA and bilateral filtering for edge preservation and noise reduction of point cloud data for feature extraction. The hybrid method is compared with the state-of-the-art methods using key performance indicators like accuracy, precision, and recall. As compared to the state-of-the-art defect localization algorithms (in terms of accuracy, precision, and recall), the suggested approach achieves the best RME (5%) and accuracy (95%), precision (93%) and recall (91%) demonstrating its robustness in identifying the robotic defect. Since the proposed solution achieves significant improvements in problem locality, it establishes new state-of-the-art for defect detection in difficult conditions by combining PCA with bilateral filtering. It also provides a robust and efficient approach to real-time applications in robotic systems.
##plugins.themes.bootstrap3.article.details##

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.