Unified Robotic Automation and AI-Driven Transformer-Guided Graph Neural Network with Hybrid 3D-CNN, BiLSTM, and Adaptive Neuro-Symbolic Fuzzy Decision Framework for Histological Subtype and Lymph Node-Aware Breast Cancer Prediction
##plugins.themes.bootstrap3.article.sidebar##
##plugins.themes.bootstrap3.article.main##
Abstract
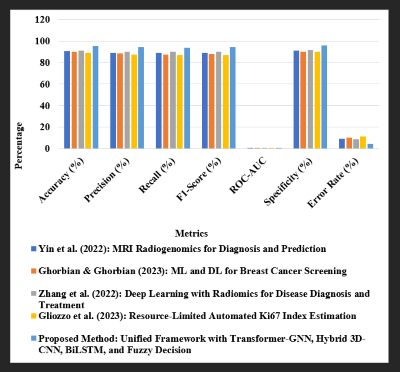
Breast cancer remains one of the leading causes of female deaths worldwide. Accurate histological subtype and lymph node involvement are critical for effective treatment planning. Existing methods fail to integrate spatial, temporal, and relational knowledge effectively, limiting diagnostic accuracy and adaptability in a dynamic healthcare landscape. Rapid advances in artificial intelligence and robotic technologies now provide new opportunities to address long-standing challenges. The proposed study aims to design an integrated framework fusing transformer-guided graph neural networks, hybrid 3D convolutional neural networks, bidirectional long short-term memory networks, and an adaptive neuro-symbolic fuzzy decision system to achieve highly accurate and interpretable breast cancer risk predictions. The proposed system extracts spatial features using 3D convolutional neural networks; models the temporal dependencies in a network using bidirectional long short-term memory networks and relational information in a graph using a transformer-guided graph neural network; combines these in a neuro-symbolic fuzzy decision framework to get robust yet explainable predictions. The unified framework surpassed the state-of-the-art methods by achieving 95.2% accuracy, 94.1% precision, 93.8% recall, and a F1 score of 94.0%. The area under the receiver operating characteristic curve of 0.967 and reduced error rate (4.8%) showed its superior performance compared to alternatives. This system offers innovative, reliable, and transparent solutions for the diagnostics of breast cancer, which allows patients to receive better results while creating a new standard in artificial intelligence-driven healthcare.
##plugins.themes.bootstrap3.article.details##

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.