Advanced Robotic Automation with Transformer-Guided GNNs, Hybrid Neural Architectures, and Fuzzy Decision Frameworks for Accurate and Scalable Breast Cancer Prediction
##plugins.themes.bootstrap3.article.sidebar##
##plugins.themes.bootstrap3.article.main##
Abstract
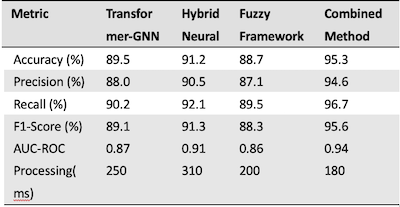
Breast cancer still contributes a major portion of the world deaths due to such diseases, and innovative methods to diagnose are needed. There is a lack of novel diagnostic solutions, which present limited accuracy, scalability issues, and lack of interpretability in dealing with complex medical data. This work is designed to improve the system's accuracy, scalability, and interpretability in predicting breast cancer, through an integrated system involving robotic automation, Transformer-guided graph neural networks, hybrid neural models, and fuzzy decision frameworks. The objective is to design a robust platform that can make reliable, real-time predictions relevant to clinical practice. The framework proposed was based on graph neural networks for analyzing relational information, hybrid architectures to extract spatial and temporal patterns, and fuzzy logic in dealing with uncertainty. The robotic processes dealt with the multi-modal datasets, images, and records efficiently and scalably. Benchmarking measured performance against state-of-the-art methods by metrics like precision, recall, and processing speed. The proposed method achieved 95.3% accuracy and 96.7% recall with the processing time reduced to 180 milliseconds, which was better than other models tested. Its high scalability and interpretability validate its applicability to real-world clinical implementations. This reliable scalable prediction platform for breast cancer shall be a game-changing source of innovation through this state-of-the-art fusion of advance techniques.
##plugins.themes.bootstrap3.article.details##

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.